Table of Contents
Parallel Axis Theorem: As an alternative to integration, both area and mass moments of inertia can be calculated via the method of composite parts, similar to what we did with centroids. In this method, we will break down a complex shape into simple parts, look up the moments of inertia for these parts in a table, adjust the moments of inertia for the position, and finally add the adjusted values together to find the overall moment of inertia. This method is known as the method of composite parts.
A key part of this process that was not present in centroid calculations is the adjustment for position. As we know, the area and mass moments of inertia are dependent upon the chosen axis of rotation. Moments of inertia for the parts of the body can only be added when they are taken about the same axis. The moments of inertia in the table are generally listed relative to that shape’s centroid though.
Because each part has its own individual centroid coordinate, we cannot simply add these numbers. We will use something called the Parallel Axis Theorem to adjust the moments of inertia so that they are all taken about some standard axis or point. Once the moments of inertia are adjusted with the Parallel Axis Theorem, then we can add them together using the method of composite parts.
What Is the Parallel Axis Theorem?
In physics, we love to simplify situations. After all, who wants to do complex, calculus-based math and spend hour upon hour playing with algebra? Well, actually, I suppose a lot of physicists do like that. But only when it’s genuinely necessary.
In other lessons, we’ve talked about the moment of inertia. Rotational inertia, otherwise known as moment of inertia, is a number that represents how much mass a rotating object has and how it is distributed. An object with more rotational inertia is harder to accelerate. Moment of inertia is measured in kilogram meters squared (kg m2).
But everything we’ve focused on involves situations that have nice, uniform objects. Spheres, shells, rings… anything symmetrical. And it also assumed that those objects were rotating around an axis that went straight through the center of mass of the object. But what happens when that’s not the case?
Well, you could do a load of complex calculus. Or, if you don’t like calculus, like most people, you could use the parallel axis theorem.
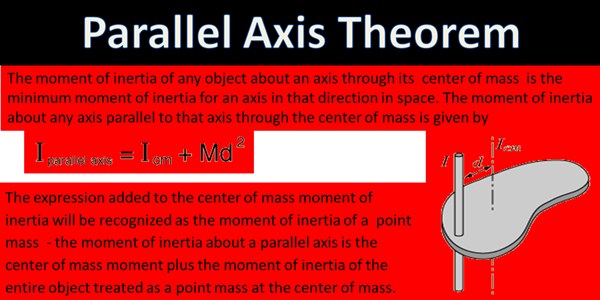
The parallel axis theorem states that the moment of inertia of an object around a particular axis is equal to the moment of inertia around a parallel axis that goes through the center of mass, plus the mass of the object, multiplied by the distance to that parallel axis, squared.
The moment of inertia around the center of mass is a minimum value. If you move the rotation axis elsewhere, the moment of inertia, how difficult it is to slow or speed up the rotation of the object, increases.
Equation/ Formula
The parallel axis theorem is much easier to understand in equation form than in words. Here it is:
I = Icm + mr ^2
This diagram shows a randomly shaped object with a rotation axis that doesn’t go through the center of mass:
But if you take a parallel rotation axis that does go through the center of mass, we can use that to figure out the moment of inertia through the actual rotation axis.
If we know, or we can figure out, the moment of inertia through the center of mass axis, Icm, measured in kilogram meters squared, and we know the total mass of the object, m, measured in kilograms, and the distance the parallel axis is away from the center of mass, r, measured in meters, we can just plug those numbers in and figure out the moment of inertia through our off-center rotational axis.
Derivation/ Proof
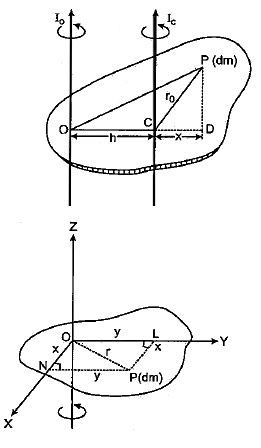
Consider a rigid mass rotating about an axis passing through a point ‘O’ and perpendicular to the plane of the figure.
Let the moment of inertia of the body about an axis passing through the point ‘O’. Take another parallel axis of rotation passing through the center of mass of the body.
Let be the moment of inertia of the body about point ‘C’.
Let the distance between the two parallel axes be .
Take a small element of the body of mass ‘dm’ situated at a point P. Join OP and CP, then
From the point, P draws a perpendicular to OC produced.
Let
From the figure,
Multiplying the above equation with ‘dm’ on both side and integrating, we get
as ‘C’ is the center of mass and algebraic sum of moments of all the particles about the center amass is always zero, for the body in equilibrium.
……(1)
But Mass of the body.
and
Substituting in equation (1), we get
This proves the theorem of parallel axes about the moment of inertia.
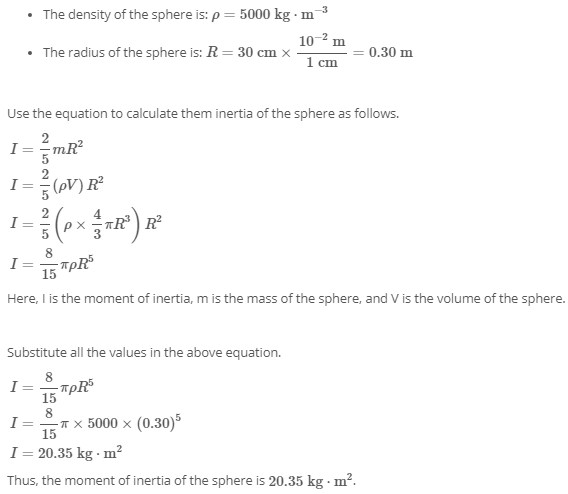
Examples
A uniform sphere of radius R = 30 cm is made of a material of density 5000 kg/m3. Find the moment of inertia about an axis through the center of the sphere.